
‘AutoRED’의 자율 주행 알고리즘 연구에 대해 국제 저널 ‘IEEE 로보틱스 앤 오토메이션 매거진’에서 소개
유원상 지도교수, “자율 주행 기술 전문가 양성을 위해 적극 지도”

[U's Line 유스라인 정다연 기자] 선문대(총장 문성제)는 스마트정보통신공학과 자율 주행 전공 동아리 ‘AutoRED’팀(지도교수 유원상)이 국제 저널 IEEE 로보틱스 앤 오토메이션 매거진(IEEE Robotics & Automation Magazine)에 소개됐다고 29일 밝혔다.
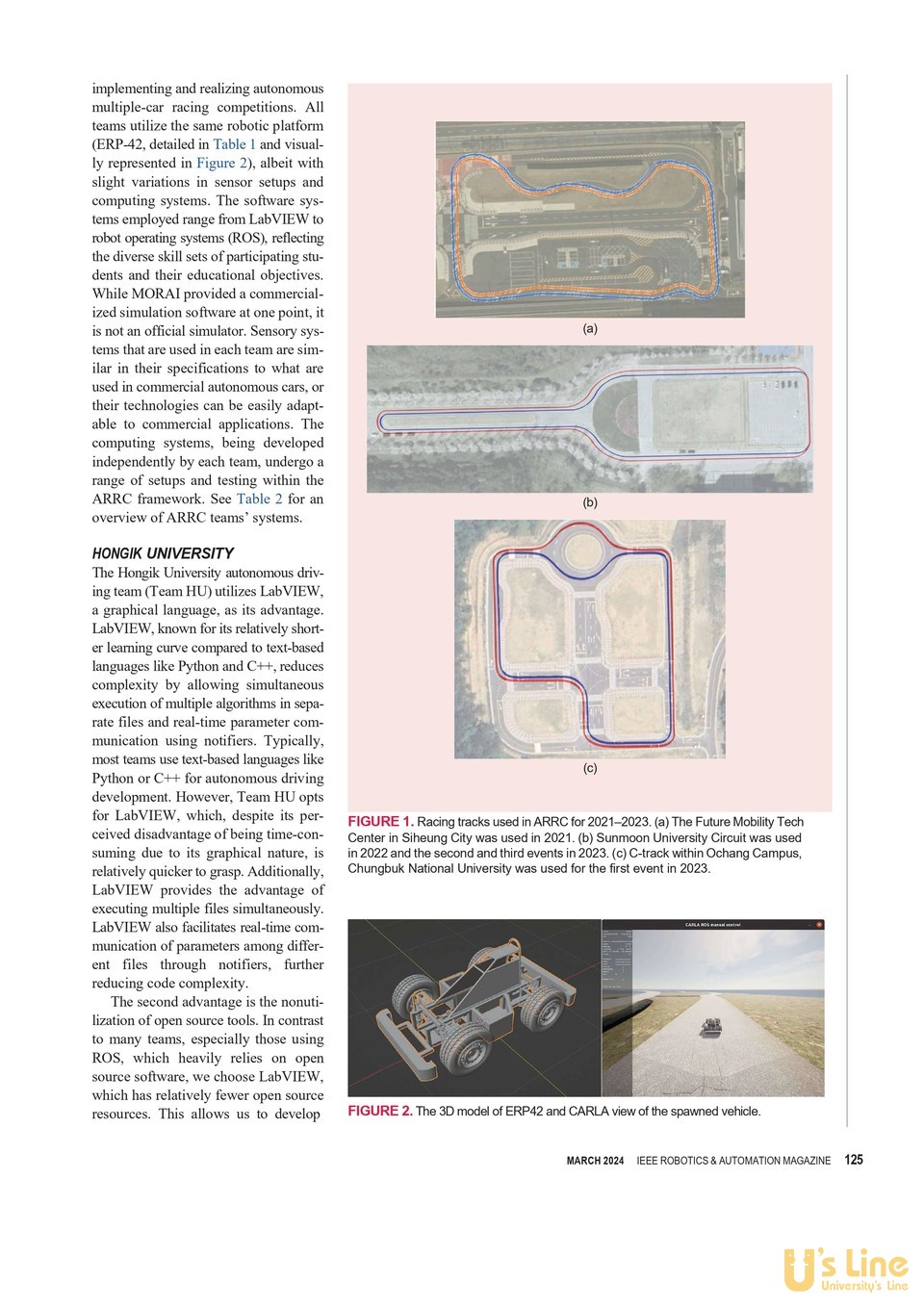
IEEE 로보틱스 앤 오토메이션 매거진은 로봇공학 분야에서 국제적으로 저명한 저널이다. 2024년 3월호에는 국내 최초 자율 주행 로봇 레이싱 대회(Autonomous Robot Racing Competitions: Truly Multivehicle Autonomous Racing Competitions)를 다루면서 AutoRED팀의 이력과 연구 방향을 소개했다.
AutoRED팀은 스마트정보통신공학과 2~4학년으로 구성된 전공 동아리다. 컴퓨터공학, 정보통신공학, 기계공학 등의 배경지식을 갖추고, 유원상 교수가 이끄는 인공지능영상처리 연구실(AIIP Lab, http://aiip.sunmoon.ac.kr)의 지도와 자문을 통해 알고리즘을 개발하고 있다.

2021년부터 자율 주행 로봇 레이스 대회에 꾸준히 참가하며 안전과 레이싱에 최적화된 자율 주행 알고리즘을 구현했다. 순수 경로 추적 알고리즘 기반의 솔루션으로 LiDAR(빛 감지 및 거리 측정)에서 전방 360도로 장애물을 감지하고 피할 수 있다. 360도 장애물 인식, 장애물 회피, 충돌 감지 알고리즘을 탑재해 국내에서 개최된 자율 주행 로봇 레이스 대회에서 2022년 최우수상, 2023년 안전운행상을 수상했다. 이와 관련해 2편 이상의 국내 학회 논문을 발표한 바 있다.
AutoRED의 팀장인 정훈교(4학년) 학생은 “명성 있는 국제 저널에 소개돼 자랑스럽다. AutoRED팀은 앞으로도 경주 중 복잡하고 위험한 상황에서 안전과 속도를 모두 확보할 수 있는 고성능 주행 알고리즘을 개발하는 데 최선을 다할 것이다”고 말했다.
지도교수인 유원상 교수는 “선문대 현장실습지원센터의 기업 연계형 캡스톤디자인과 자율 주행 동아리에 대한 적극적인 지원을 통해 학부생이 졸업 후 자율 주행 기술 전문가로 성장할 수 있도록 적극 지도하겠다”고 말했다.
한편 선문대에서는 2022년, 2023년 두 차례에 걸쳐 자율 주행 경주 대회를 개최한 바 있으며, DSC(대전·세종·충남) 지역혁신사업 스마트휴먼인터페이스 사업단 등을 통해 다양한 자율 주행 교육 프로그램을 지원하고 있다.